


00/00






















技术竞赛
已结束

PRCV 2025 基于大模型的AIGC图像质量评估挑战赛
以大模型为核心的生成式人工智能(AIGC)技术正迅猛发展,文本生成图像(Text-to-Image)作为多模态大模型的代表性应用,以前所未有的速度重塑艺术创作、视觉设计、数字娱乐等众多领域,展现出强大的创造力和广阔前景。多模态大模型能够根据文本提示生成高度逼真或富有创意的图像,但其输出质量存在显著波动。伴随着技术能力的提升,如何建立一套客观、精准且覆盖多维度的评价体系,科学的衡量AIGC图像的质量与图文匹配度,已成为推动该技术深化应用与可持续发展的核心挑战。我们期望参赛者充分挖掘多模态大模型在深度理解图像内容、精准对齐语义等方面的判别潜能,探索大模型作为“AI评委”在自动化、智能化评价其他大模型生成图像任务上的方法边界与最佳实践。
已结束

PRCV 2025 超高速脉冲视觉数据集及开放任务挑战赛
近年来,基于脉冲相机(spike camera)的视觉研究正快速发展。不同于传统帧式成像,脉冲相机受启发于生物视觉系统,其每个像素独立根据光强变化主动发放脉冲信号,采样频率最高可达 40,000Hz。其输出形式为二值脉冲的时空阵列(0/1脉冲信号),具有极高的时间分辨率与出色的动态感知能力,特别适用于高速运动、高动态范围、连续变化等复杂场景。与此同时,脉冲视觉也面临前沿挑战:由于其数据形式全新,传统图像算法和评估机制难以直接适用,亟需开发适配脉冲数据的新型视觉算法和构建适应性强的开放基准。本次挑战赛将举办数据集与基准评测和新应用与开放研究挑战赛。
已结束
CSIG | 华为2025“Camera学术之星”影像算法技术竞赛
为推动国内高等院校、科研院所在Camera及其相关领域在读学生的培养,选拔优秀人才,中国图象图形学学会 、华为终端有限公司携手举办第六届CSIG图像图形技术挑战赛—2025“Camera学术之星”影像算法技术竞赛。
已结束
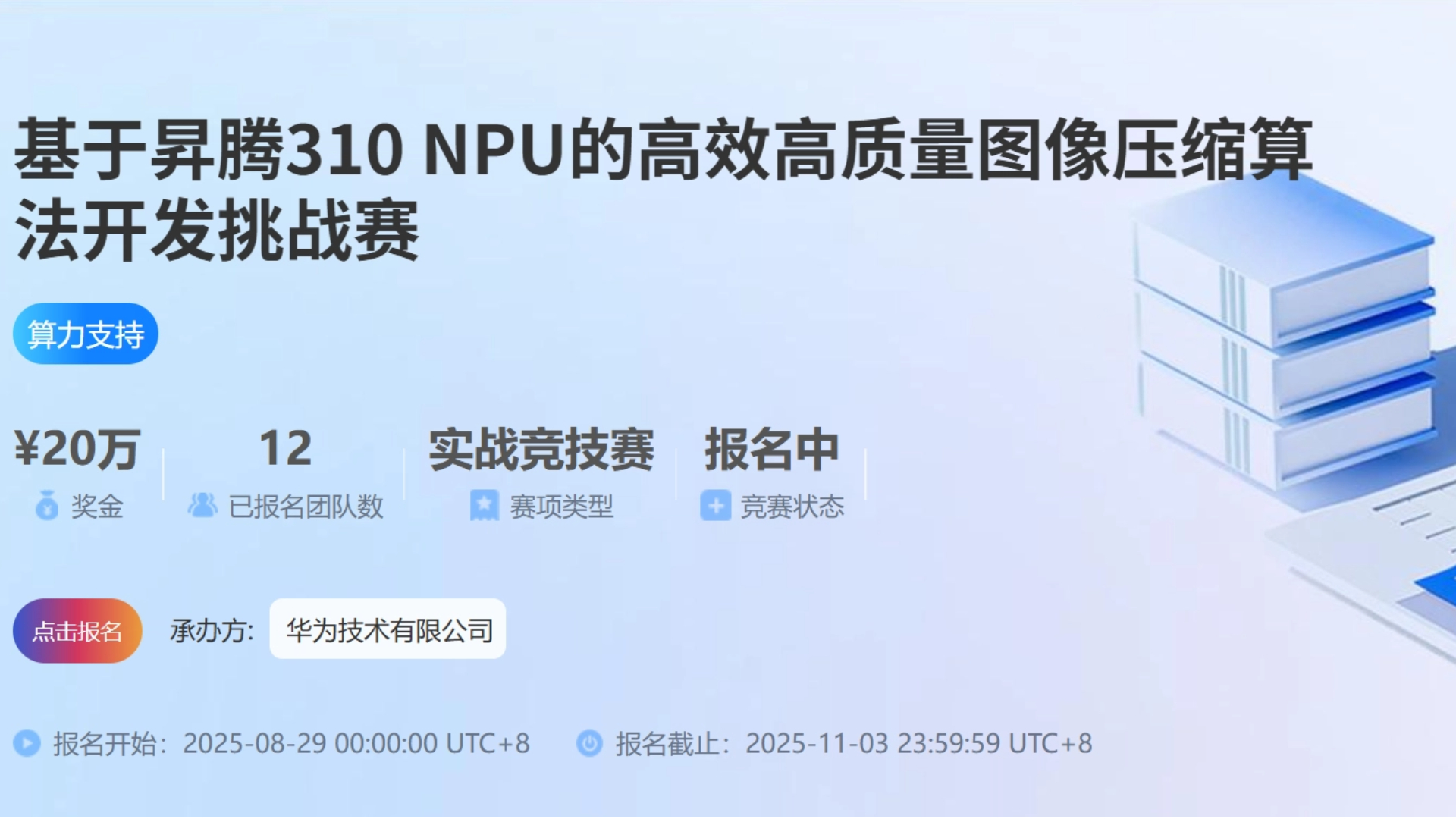
基于昇腾310NPU的高效高质量图像压缩算法开发挑战赛
图像压缩技术在数字时代至关重要,广泛应用于遥感、医疗、数字媒体、通信等领域。随着AI、深度学习等技术的发展,图像压缩正从传统编码(如JPEG、JPEG2000)向智能压缩(如基于扩散模型、神经网络的编码)演进。通过赛事推动边缘侧高效图像压缩技术的落地,助力解决“存储成本高、带宽受限、实时性不足”等社会痛点。
专刊征稿
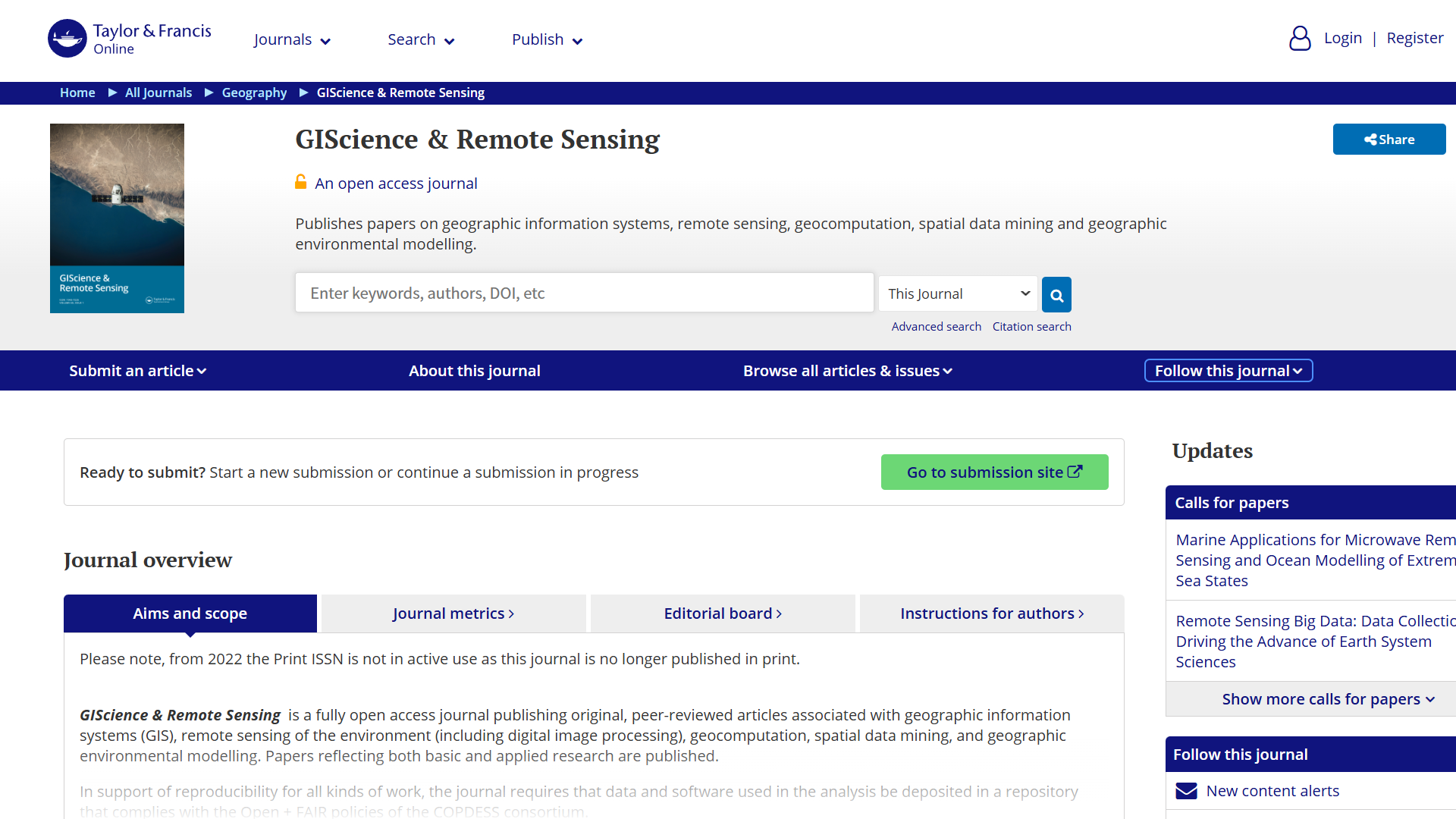
GIScience & Remote Sensing | 阴雨环境中的遥感:挑战、进展和应用
多云和多雨的环境在热带、亚热带和其他经常受云量和降雨影响的地区很常见。这些具有挑战性的条件对遥感数据的采集、处理和应用构成了重大障碍,同时也激发了方法和技术的创新。这些地区有效的遥感方法和应用对于支持环境监测、灾害管理和可持续发展至关重要,使其成为环境遥感研究的重点。本特刊旨在推动遥感在恶劣天气条件下应用的方法和技术进步,并支持云雨环境中的可持续发展。
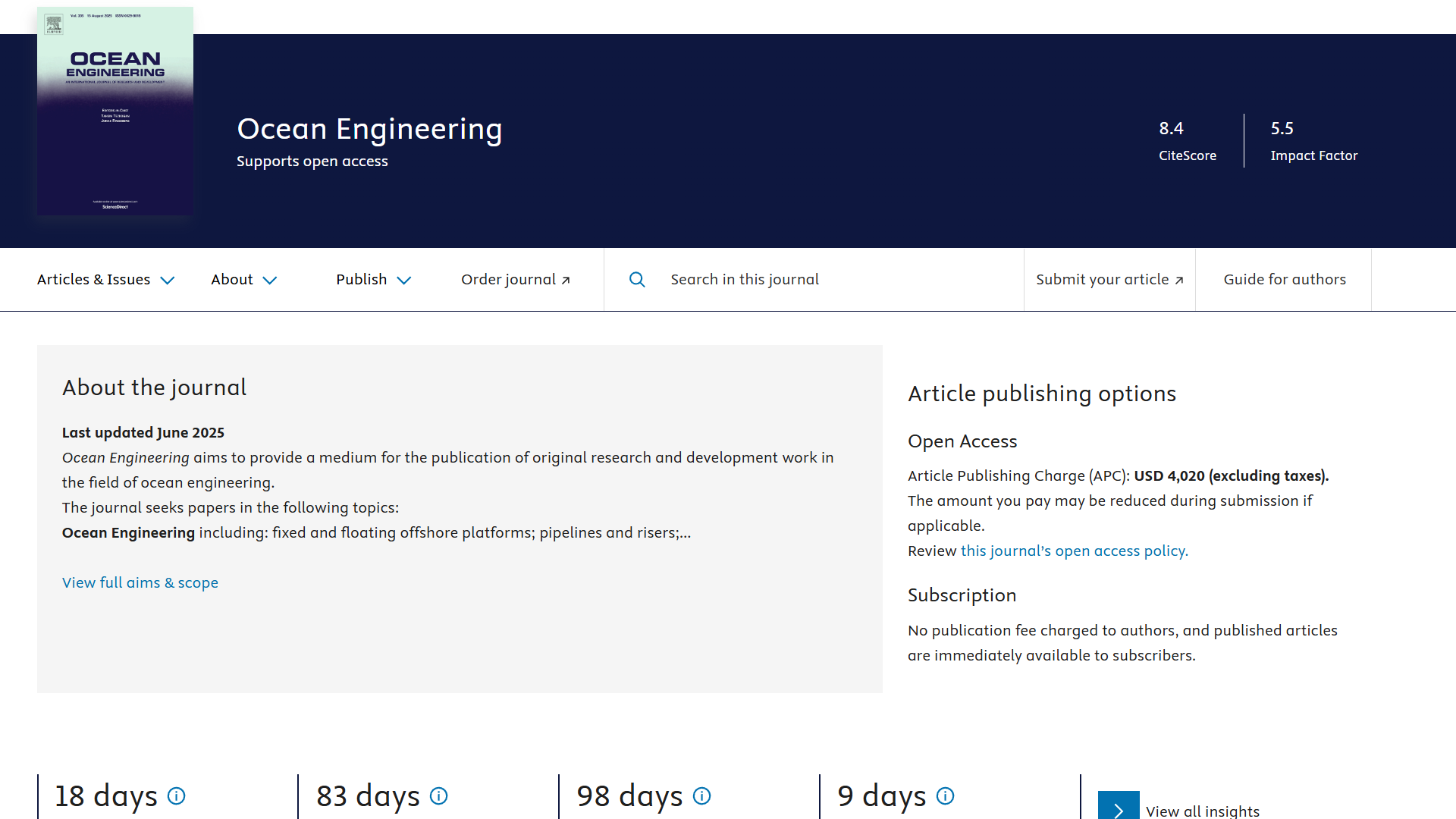
Ocean Engineering | 水下工程的多模态3D感知:声学、光学和集成解决方案
水下环境中的准确 3D 感知已成为各种海洋工程任务的关键要求,例如海底基础设施检查、水下航行器的自主导航、栖息地测绘和环境监测。然而,浊度、光散射、能见度有限和动态水流等水下条件使得传统成像技术无效。为了克服这些挑战,研究人员开发了广泛的声学(例如多波束声纳、侧扫声纳)和光学(例如立体视觉、激光扫描、光度立体、基于 SLAM)的水下 3D 重建方法。本特刊旨在探讨水声和光学三维重建技术的最新进展及其在以工程为重点的海洋应用中的实际应用。我们欢迎高质量的原创研究,通过硬件创新、先进算法、多模态传感器融合和在真实海洋条件下的实验验证来应对水下 3D 重建的挑战。

Pattern Recognition | 恶劣环境下的视觉基础模型和提示技术
基础模型的出现(如 CLIP、DINO、SAM、BLIP、Segment Anything 和扩散模型)彻底改变了视觉表征学习,使得零样本迁移和跨多种任务的统一建模成为可能。然而,在极端低光、浓雾、水下、运动模糊和低分辨率等恶劣视觉条件下,这些模型的鲁棒性和适应性仍未被充分探索,且高度依赖具体应用场景。本专刊诚邀原创研究文章,探讨如何适配、增强或微调基础模型及基于提示的学习范式,以在退化视觉环境下实现稳健性能。
IEEE JSTARS | 非理想环境下基于感知驱动的遥感图像增强与检测方法
本特刊“非理想环境下基于感知驱动的遥感图像增强与检测方法”旨在探索创新的感知驱动方法,通过利用先进算法和人工智能的类人感知能力,改善图像的清晰度、对比度和整体质量。这些新技术将提高遥感数据在环境监测、灾害响应、农业管理和城市规划等关键应用中的可用性。本特刊将汇集最新的基于感知的图像处理技术研究,旨在克服传统方法的局限性,特别是在具有挑战性的环境条件下。通过聚焦感知驱动模型与遥感的协同作用,本特刊旨在促进跨学科合作,推动图像增强技术的边界。



